

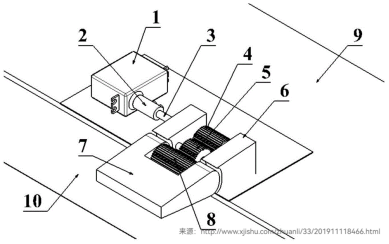
1. Principiu di funziunamentu di u servomotore
Un servomotore hè un tipu di driver di servomotore di pusizione (angulu), custituitu da cumpunenti di cuntrollu elettronichi è meccanichi. Quandu u signale di cuntrollu hè in entrata, a parte di cuntrollu elettronicu aghjusta l'angulu di rotazione è a velocità di l'uscita di u mutore DC secondu l'istruzzioni di u controller, chì saranu cunvertiti in spustamentu di a superficia di cuntrollu è cambiamenti d'angulu currispondenti da a parte meccanica. L'alberu di uscita di u servomotore hè cunnessu à un potenziometru di feedback di pusizione, chì trasmette u signale di tensione di l'angulu di uscita à a scheda di circuitu di cuntrollu attraversu u potenziometru, ottenendu cusì un cuntrollu in circuitu chjusu.
2. Applicazione nantu à i veiculi aerei senza pilotu
L'applicazione di i servomotori in i droni hè estensiva è critica, riflettendosi principalmente in i seguenti aspetti:
1. Cuntrollu di volu (cuntrollu di u timone)
① Cuntrollu di l'orientazione è di l'inclinazione: U servo di u drone hè principalmente utilizatu per cuntrullà l'orientazione è l'inclinazione durante u volu, simile à u sterzu di una vittura. Cambiendu a pusizione di e superfici di cuntrollu (cum'è u timone è l'elevatore) in relazione à u drone, u servo pò generà l'effettu di manuvra necessariu, aghjustà l'attitudine di l'aeromobile è cuntrullà a direzzione di u volu. Questu permette à u drone di vulà longu una rotta predeterminata, ottenendu virate, decolli è atterraggio stabili.
② Aghjustamentu di l'attitudine: Durante u volu, i droni anu bisognu di aghjustà constantemente a so attitudine per affruntà diversi ambienti cumplessi. U servomotore cuntrolla precisamente i cambiamenti d'angulu di a superficia di cuntrollu per aiutà u drone à ottene un aghjustamentu rapidu di l'attitudine, assicurendu a stabilità è a sicurezza di u volu.
2. Acceleratore di u mutore è cuntrollu di l'acceleratore
Cum'è attuatore, u servo riceve signali elettrichi da u sistema di cuntrollu di volu per cuntrullà precisamente l'anguli d'apertura è di chjusura di l'acceleratore è di e porte di l'aria, aghjustendu cusì l'alimentazione di carburante è u vulume di aspirazione, ottenendu un cuntrollu precisu di a spinta di u mutore è migliurendu e prestazioni di volu è l'efficienza di u carburante di l'aeromobile.
Stu tipu di servo hà esigenze assai elevate per a precisione, a velocità di risposta, a resistenza à i terremoti, a resistenza à e alte temperature, l'anti-interferenza, ecc. Attualmente, DSpower hà superatu queste sfide è hà ottenutu applicazioni mature per a pruduzzione di massa.
3. Altri cuntrolli strutturali
① Rotazione di u gimbal: In i veiculi aerei senza pilotu equipati di gimbal, u servo hè ancu rispunsevule di u cuntrollu di a rotazione di u gimbal. Cuntrullendu a rotazione urizzuntale è verticale di u gimbal, u servo pò ottene un pusizziunamentu precisu di a camera è l'aghjustamentu di l'angulu di ripresa, furnendu immagini è video di alta qualità per applicazioni cum'è a fotografia aerea è a surveglianza.
② Altri attuatori: In più di l'applicazioni sopra menzionate, i servi ponu ancu esse aduprati per cuntrullà altri attuatori di droni, cum'è dispositivi di lanciu, dispositivi di bloccu di u grembiule, ecc. L'implementazione di queste funzioni si basa nantu à l'alta precisione è l'affidabilità di u servo.
2. Tipu è selezzione
1. Servu PWM: In i veiculi aerei senza pilotu di dimensioni chjuche è medie, u servo PWM hè largamente utilizatu per via di a so bona cumpatibilità, a forte putenza esplosiva è a simplicità di l'azione di cuntrollu. I servo PWM sò cuntrullati da signali di modulazione di larghezza d'impulsu, chì anu una velocità di risposta rapida è una alta precisione.
2. Servo di bus: Per i droni grandi o i droni chì necessitanu azzioni cumplesse, u servo di bus hè una scelta megliu. U servo di bus adotta a cumunicazione seriale, chì permette di cuntrullà parechji servo centralmente attraversu una scheda di cuntrollu principale. Tipicamente utilizanu encoder magnetichi per u feedback di pusizione, chì hà una precisione più alta è una durata di vita più longa, è pò furnisce feedback nantu à diversi dati per monitorà è cuntrullà megliu u statu operativu di i droni.
3 、 Vantaghji è Sfide
L'applicazione di i servi in u campu di i droni hà vantaghji significativi, cum'è e dimensioni ridotte, u pesu ligeru, a struttura simplice è a facilità d'installazione. Tuttavia, cù u sviluppu cuntinuu è a pupularizazione di a tecnulugia di i droni, sò stati messi in opera esigenze più elevate per a precisione, a stabilità è l'affidabilità di i servi. Dunque, quandu si selezziunanu è si utilizanu i servi, hè necessariu cunsiderà cumpletamente i bisogni specifichi è l'ambiente di travagliu di u drone per assicurà u so funziunamentu sicuru è stabile.
DSpower hà sviluppatu i servi di a serie "W" per i veiculi aerei senza pilotu, cù involucri tutti in metallo è resistenza à temperature super basse finu à -55 ℃. Sò tutti cuntrullati da CAN bus è anu una classificazione di impermeabilità IPX7. Anu i vantaghji di alta precisione, risposta rapida, antivibrazione è antiinterferenza elettromagnetica. Benvenuti tutti à cunsultà.
In riassuntu, l'applicazione di i servi in u campu di i veiculi aerei senza pilotu ùn hè micca limitata à e funzioni basiche cum'è u cuntrollu di u volu è l'aghjustamentu di l'attitudine, ma implica ancu parechji aspetti cum'è l'esecuzione di azzioni cumplesse è a furnitura di un cuntrollu di alta precisione. Cù u cuntinuu avanzamentu di a tecnulugia è l'espansione di i scenarii d'applicazione, e prospettive d'applicazione di i servi in u campu di i veiculi aerei senza pilotu saranu ancu più ampie.
Data di publicazione: 23 di settembre di u 2024